南京工业大学土木工程学院智能建造实验室位于南京工业大学江浦校区地坤楼。智能建造实验室是一个专注于建筑行业数字化和智能化解决方案的科研和教学平台,由BIM实验室、智能施工设备实验室、智慧运维实验室组成。其中BIM实验室拥有图形工作站、67台电脑,可以完成基于于岗位的虚拟运营平台、装配式、智慧工地仿真实践教学,能够围绕 “BIM技术应用”“BIM+智慧工地应用”等热点技术,紧抓数字化发展趋势,深入研究梳理行业业务,将行业与教学业务紧密结合,为企业打造BIM+的技术解决方案。智能施工设备实验室具备四足机器人、Moveit机械臂小车等设备,可以进行图像识别应用、图像检测应用以及设备路径规划的研究,为行业工程管理的效率提升,施工现场的安全隐患减少,工作人员的健康和安全的保障等需求提供平台支持与服务。智慧运维实验室拥有智能建造显示系统、深开鸿全场景实验箱以及物联网套件等设备,搭建基于BIM的运维管理平台,挖掘BIM模型中的数据价值,针对运维期间的空间与环境、设备与资产、管网冬天、安防应急、能源消耗进行管理,解决业主运维过程中遇到的管理难题。
自2022年成立以来,实验室凭借其全面而先进的设备阵容、严谨的科研态度和高效的工作流程,已成功完成了众多科研项目,不仅在国内外知名期刊上发表了多篇高水平论文,还促进了多项科研成果转化与应用。实验室秉持开放合作的精神,诚挚邀请国内外的专家学者、业界同仁及广大用户莅临参观交流。
主要仪器设备介绍:
智能建造显示系统
该系统由筑影系列LED显示单元组成,采用LED光源,具有高亮度、智能化等特点,独特的双CPU芯片设计更提升了系统的数据处理能力,从而使光学引擎运行更加稳定,影像处理更加游刃有余。同时LED系列的智能色彩亮度自动调整功能,可对不同显示单元的亮度、色彩参数做出自动调整,实现显示系统图像亮度和色彩的实时均匀性和一致性。同时,系统采用具有优越性能的图像控制器, 全交换技术架构,DVI/RGB/VIDEO/HDTV/3G-SDI/4K/IP流媒体等多种信号输入及显示,所有信号以60帧/秒全实时处理显示,由此形成了一个高亮度、高分辨率、高清晰度、高智能化控制、操作先进的大屏幕显示系统,保证了智慧实训室大屏幕系统的快速反应和稳定运行,提升仿真模拟度和实训操作效果。

仪器特点:
显示点间距1.86mm,原厂黑色LED管模组尺寸 320*160, 屏体尺寸:4.8M*2.4M=11.52平方 ,显示屏像素点:2580*1290,LED系统控制软件要求支持麒麟系统, 提供二次开发接口数据对接定制开发。具备通过通信端口和控制软件,手动操作在任意输出终端显示多个任意大小的窗口,也可将多个不同的窗口开到一个屏幕上,支持16/12/9/8/4/1等多种预览画面分割模式。支持TCP/IP网络或者RS232端口进行控制,支持IR红外及按键,支持第三方设备对其进行控制等多种控制方式控制。
四足机器人
该四足机器人开发平台需要包含运动控制和智能感知两个开发接口,方便用户快速便捷地进行二次开发,可用于机器人领域的多学科实践教学、科学研究以及专业竞赛。每条腿有3个关节,共计12个关节。关节由大功率直流电机、精密减速机构和绝对式旋转编码器组成,可提供强大的关节动力、良好的力控性能以及高精度的角度反馈信息,可以满足各种高动态运动控制和步态规划开发的需要。

仪器特点:
1、机器人的平衡算法采用触地判断的电机全力控算法,足底不安装压力传感器和气囊,可以实现360°足底三维受力感测,不易磨损;
2、机器人大腿采用铝合金材质、机器人小腿采用高强度复合塑料材质,足底采用坚硬的实心耐磨橡胶不含气囊和导管,路面适应性强;
3、机器人的电机采用内转子设计,电机在提供足够扭矩的情况下,电机的转速也能维持高速运转;
4、机器人自带可输出内置电源(5V/24V)和通讯接口(至少包括Type-C/Ethernet/ USB3.0/HDMI),方便二次开发。
主要技术参数:
1、站立尺寸:长:610±10mm,宽:370±10mm,高:455±10mm;
2、整机重量(带电池)不低于12-13kg;最大可持续运动负载不小于7 kg;
5、提供稳定的行走及快速步态,最高行走速度 ≥2.5m/s;最大稳定爬坡角度≥40°;最大稳定上下台阶高度≥15cm;
6、配备紧凑高性能锂电池,电池采用分离式设计,可以不借助外部工具快速拆装;为了方便运输,电池容量应不超过4500mAh, 额定能量应不超过135Wh/30V; 续航时间:正常行走1.5-2小时;
7、关节模组采用轻型复合材料,外径≤76mm;整机自由度≥12; 单腿自由度≥3。
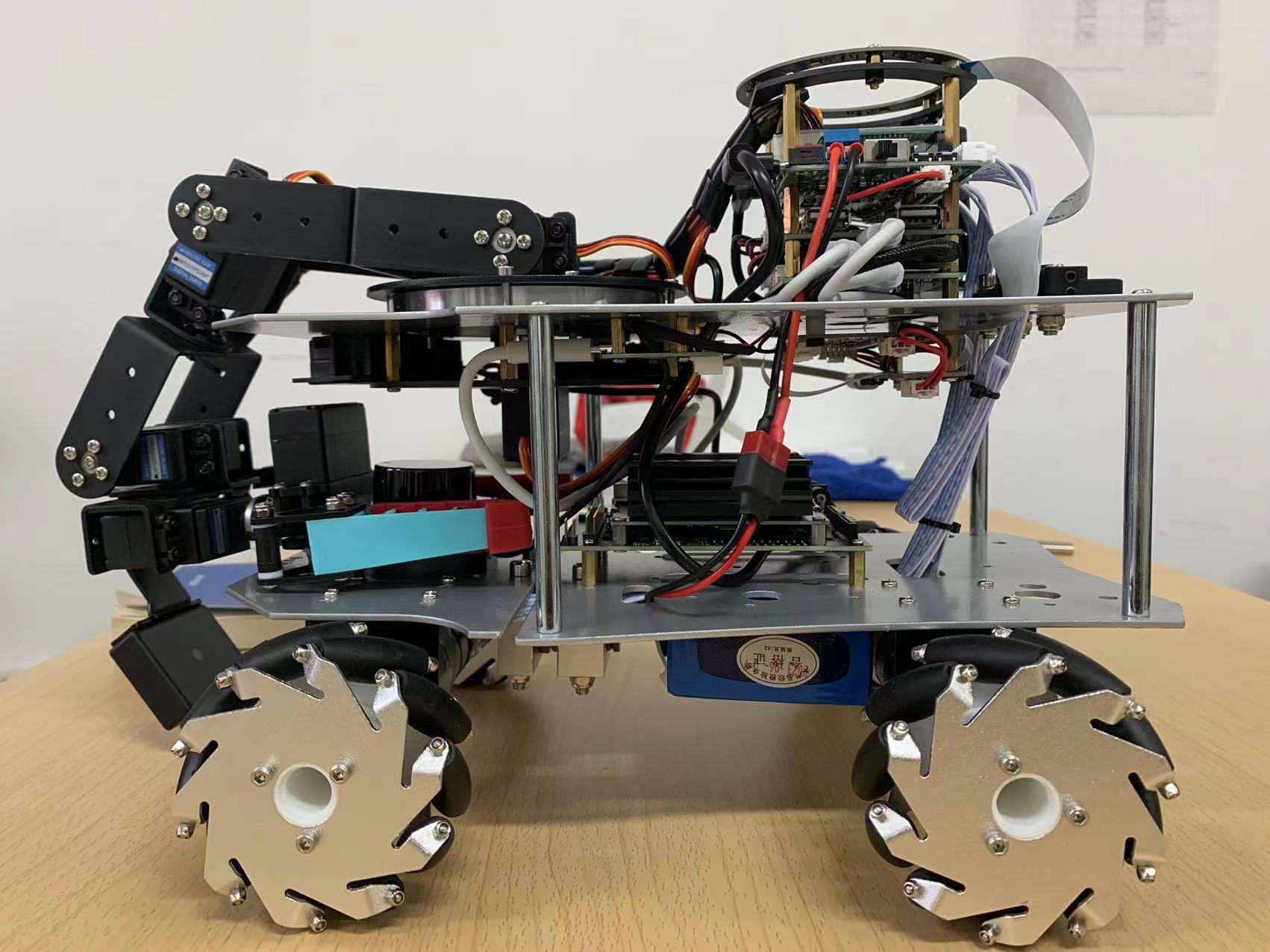
Moveit机械臂小车
该设备具备rtabmap视觉与激光雷达3D建图导航,经典2D激光雷达建图、导航、避障,ORB视觉建图功能以及图形化界面的ROSQT功能,拥有自适应柔性抓取机械爪,能完成色块分拣、颜色跟踪、人脸跟踪、手势识别等工作。
仪器特点:
1、URDF运动学仿真模型
实物等比例全还原模型仿真 RVIZ工具可视化操控支持拖拽、预设位置控制 支持笛卡尔空间路径支持机械臂运动避障。支持C++\Python 编程语言、RVIZ上位机多种控制输入方式,Move Group核心控制节点接入运动场景规划以及3D图像点云输入按需输出运动路径。
2、多个ROS1/R0S2系统
小车提供ROS1melodic、ROS1noetic、ROS2galacticROS2humble四个版本的系统镜像HUMBLE。
3、麦轮底盘技术
所有的底盘都使用全金属加工,麦克纳姆轮是金属材质的,精度与寿命比一般塑料麦轮有质的提升,特别适合ROS机器人,另外,麦轮底盘还配备了万元级底盘才有高精度悬挂系统。麦轮全向轮底盘全面升级抱紧式联轴器。
4、可选语音模块
科大讯飞六通道麦克风阵列语音模块,适用Linux/Ubuntu操作系统支持声源定位(分辨率1)、语音召唤、语音导航、语音交互等功能。
5、3D视觉
通过SDK层开发,实现骨架识别,体感互动跟随等高级功能。
6、自主知识产权的机器人集群控制算法
通过领航者算法和我司创新算法相结合,实现非常稳定的机器人群集(编队) 控制。,本技术已经在国内各大高校大量部署,机器人编队需要至少购买三个机器人才可以实现。
主要技术参数:
1、六自由度机械臂麦轮小车驱动结构采用四轮麦克纳姆轮结构两驱履带结构四轮独立驱动带摆式悬挂,其中为75mm金属麦轮。
2、整体尺寸为285*230*569mm。
3、小车运动最大速度为1.4m/s。
4、轻载续航6.5h,负载1kg续航4h。
5、电机采用MG513金属齿轮减速电机,采用500线AB相高精度GMR编码器。
6、多种灵活控制方式:APP、PS2无线手柄、CAN、串口等。
7、主控采用STM32F407VET6。搭载激光雷达镭神N10P。
8、ROS主控采用树莓派4B。深度摄像头采用了Astra系列RGBD深度相机。
9、ROS使用了ROS1-Melodic/Noetic、ROS2-Galactic/Humble、STM32使用了FreeRTOS操作系统。
深开鸿全场景实验箱
全场景实验箱是深开鸿为发展操作系统应用生态及底层开发人才生态,以KaihongOS为技术底座,结合深开鸿AIoT开发套件和智慧屏开发套件,灵活扩展,柔性组合,专项研发的一款OpenHarmony全场景超级设备解决方案。深开鸿全场景实验箱提供丰富教学资源,赋能一站式教学,以构筑行业数字化生态、培养生态人才为己任,致力于满足学生实训需求,助力提升学生专业技能。

仪器特点:
1、国产开源鸿蒙操作系统。主要用于连接部署在监测环境中的16 种不同传感设备,收集各种监测数据,通过不同模块的灵活组合,解决实际工程的应用需求。
2、基于开鸿的教学实训箱。主要用于满足智能建造与运维日常教学实验及综合场景实训的应用需求。例如利用开源鸿蒙的原子化卡片服务能力,定制开发应力应变检测功能;可通过传感器监测各类室内环境指标,开发环境控制系统启停功能,并实时显示室内环境指标数据等。
3、数字孪生空间计算平台和数字孪生空间浏览器。以数字架构为核心,主要用于满足全部应用基于此产品内的BIM数据库进行的开发。
4、空间软总线分析算法。主要用于通过无代码分析计算插件,利用BIM中的模型数据,对空间的三维物理数据进行仿真计算的过程,如水淹分析,客流分析,导航计算分析是基于空间中的拓扑算法,结合区域,面积等进行计算仿真,达到辅助决策及防患于未然的目的。
5、空间软总线建模软件。SoonBuilder建模软件遵循CityGML标准,除BIM的参数和工程属性外,SoonBuilder充分定义了几何、拓扑、 语义、外观属性等。其中包括了主题分类之间的层次、聚 合、对象之间的关系、空间属性等,将BIM模型部署到各种不同应用中的复杂分析任务,例如仿真、城市数据挖掘、 设施管理、主题查询等。
6、空间软总线行为逻辑动态配置器。支持数据源、目标源、目标行为与动态逻辑配置,全程以拖拽方式用于实现物联网设备告警联动、应急疏散联动、室内导航联动、空间智能建造教学场景开发、配置。
物联网教学组件
该组件为学生提供硬件连接以及软件开发相关实验支撑,使学生掌握物联网技术原理与实现途径,支撑《程序设计语言 (Python 程序设计)》、《建筑物联网 技术》与《智慧工地和智能施工设备》 等课程的实验教学使用。

仪器特点:
1、物联网采集模块:SPI接口,全彩LED接口,点阵模块串口,数字接口,模拟接口电源接口 2C接口,双10接口。
2、物联网传感器:基于ESP32开发16M FLASH,集成全彩高清IPS显示面板与多种硬件外设丰富资源接口, 兼容M5Stack堆叠模块体系与传感器体系, 可拓展性极强.底座开孔兼容8mm规格LEGO积木温湿度、大气压传感器, 采用I2C通信接口, 可快速采集环境信息。 人体传感器被动式热释电原理实现人体感应数字信号输出状态。 旋钮电位器, 模拟信号输入可用于音乐/灯光调节。 集成红外发射管, 接收器. 可自由编码, 实现红外收发。可编程 RGB LED支持编程控制任意颜色显示。